Control de un RobotCar usando los cursores del ordenador con mBlock 2.0.
Control de un RobotCar usando los cursores del ordenador con mBlock 2.0.
Un código muy sencillo para manejar un RobotCar con los cursores de nuestro ordenador, en este caso nos servirá para controlar a Perecito o cualquier RobotCar que tenga la placa que controla los motores, que describo, a continuación.
Sólo añadiré que estos códigos son lo más básico que se me ha ocurrido, que se pueden mejorar, y que están preparados para que se puedan usar con alumnos de primaria y primer ciclo de la ESO.
Sólo añadiré que estos códigos son lo más básico que se me ha ocurrido, que se pueden mejorar, y que están preparados para que se puedan usar con alumnos de primaria y primer ciclo de la ESO.
El código que os adjunto sería para la placa " Motor Driver Controlador 2 motores HG7881" , que sería la que tiene este robot
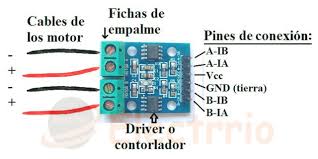
Las conexiones para los motores A y B, se hacen con pines PWM . En el código que os adjunto tenéis que saber
B - IA - Avance del motor B -- Pin PWM - 10
B - IB - Retroceso del motor B -- Pin PWM - 9
B - IB - Retroceso del motor B -- Pin PWM - 9
A - IA - Avance del motor A -- Pin PWM - 6
A - IB - Retroceso del motor A -- Pin PWM - 5
CÓDIGO para mBlock basado en Scratch 2.0.

He creado los siguientes bloques, con el objeto de que este coche los puedan programar los alumnos de primaria y secundaria, sin problemas. Estos son los bloques y variables creadas

Y el código de los bloques es el siguiente

Aunque os pueda parecer muy rudimentario manejar el robot de esta manera es muy útil a la hora de probar el funcionamiento del robot, sin necesidad de estar constantemente cargando el código. Sólo tenemos que instalar previamente en la placa de arduino el Firmware.
Distintas formas de controlar un RobotCar
Siguelíneas con mBlock 2.0.
Evita Obstáculos con mBlock 2.0.
Control del RobotCar con Realidad Aumentada usando mBlock 2.0.
Control Remoto de un RobotCar con mBlock 2.0.


Comentarios
Publicar un comentario